治学|喜讯!佗道医疗研究成果发表在国际SCI期刊《Journal of Clinical Medicine》
近日,由南京医科大学第一附属医院(江苏省人民医院)、贵州省人民医院、华中科技大学同济医学院附属普爱医院(武汉市第四医院)联合佗道医疗科技有限公司(以下简称“佗道医疗”)共同研究的成果,在国际SCI期刊《Journal of Clinical Medicine》发表。本次研究旨在开发一种新型的骨科手术机器人来辅助脊柱手术,并将其可行性和准确性与现有的骨科机器人的进行比较。经过临床实验证明,该骨科手术机器人具有很高的精度,同时优化了临床操作,适用于临床应用,为骨科医生持续赋能,为智能骨科注入新力量。
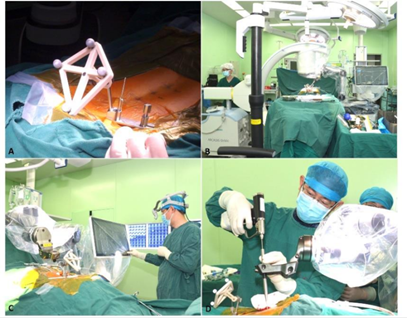
近年来,由于多种脊柱病理,越来越多的患者需要进行椎弓根螺钉固定,而螺钉植入的准确性至关重要。手术机器人作为一种辅助医疗器械,可以提高手术的准确性和安全性,越来越受到医生的青睐。机器人辅助脊柱手术也已应用于临床实践中。它在安全性、准确性、对外科医生的辐射量和学习曲线等方面都已被证实优于手工手术。目前,世界上已经开发了许多脊柱手术机器人,如MazorX,ROSA和Excelsius GPS。现有骨科手术机器人都由类似的组成结构,有一个具有跟踪能力的机械臂,可与术中三维影像导航系统相结合。在获取图像并规划所需的螺钉轨迹后,机械臂可运动至规划位置,为医生指明螺钉的位置和方向,之后由医生手动进行钻孔和螺钉植入。然而,现有骨科手术机器人也有一些缺点,包括由其跟踪器造成的创伤,以及略微复杂的操作程序。因此,我们的团队独立开发了一种新型的骨科机器人(佗手,佗道医疗科技有限公司,南京,中国)来应对现有机器人面临的挑战。
临床验证模块
佗手骨科手术机器人与现有骨科手术机器人进行了多中心随机对照试验,对照试验的主要目的是研究两种机器人在椎弓根螺钉固定过程中克氏针放置准确性的差异,其他的准确性和安全性指标也进行了比较。实验中佗手骨科手术机器人为实验组,现有骨科手术机器人为对照组。结果是实验组在克氏针置入位置的准确性方面优于对照组,同时其他实验指标也能与对照组持平。
实验对比发现,实验组克氏针放置的位置偏差明显小于对照组。在全分析集(即所有入组病例,包括合格病例和脱落病例)的情况下,实验组的克氏针置入位置偏差较对照组降低了13.86%;同时,实验组的椎弓根螺钉置入准确率为98%,对照组为94%。实验组的入点偏差明显小于对照组,数据具有统计学差异。
文章总结
通过此项研究,我们发现佗手不仅在精度和安全性方面有优良的表现,同时佗手将机械臂与工作站相结合,大大提高了手术效率和空间利用率。操作人员可以随时通过屏幕获取机械臂和克氏针的位置误差信息,提高了机器人的可操作性。
其次,佗手机械臂的末端进行了改进,保证了手术定位的准确性。其他现有骨科机器人,标定器和导向筒通过拆装机构连接到末端。长时间的反复拆卸和组装会导致物理磨损和安装位置不一致,导致精度的损失。相反,佗手的末端采用了跟踪器和导向筒的集成设计,避免了拆装导致精度下降的风险。
佗手机器人的第三个优势是手术创伤更小。在对照组中,需要将皮肤切开并将患者跟踪器固定在棘突上。有时是由于这个操作而导致手术所做的切口不小于螺钉放置的切口,这违背了微创手术的目的。使用佗手的克氏针固定器,可以在不做多余切口的情况下将患者跟踪器牢固地固定在棘突上,大大减少了创伤。

 苏公网安备 32011402011402号
苏公网安备 32011402011402号